
Tento úvodný článok nie je presným odzrkadlením vývoja, ide skôr o opis nápadu a ilustrovanie vzhľadu robota, ale v prípade záujmu (komentár, email) môžem niektoré detailné informácie rozviesť v ďalšom článku.
SecuBot? SekuČo?
Na začiatku by som mohol ujasniť, o čo vlastne ide. Jedného krásneho teplého dňa v Septembri v roku 2013, kedy som sa nudil pri pozeraní reklám v televízii, ma kopla múza - čo tak si spraviť robota. A nie hocijakého robota, ale takého, ktorý bude mať reálne využitie a bude marketingovo príťažlivý. Keďže to bolo pred niekoľkými rokmi, už si presne nepamätám, prečo ma napadol práve projekt s takýmto zameraním. SecuBot je skratka dvoch slov: Security (Bezpečnosť) a Robot (z českého slova Robot, teda robotník :) ). Názov vznikal paralelne pri premýšľaní využitia takého robota.
Fáza 1 - rapídny vývoj prvého prototypu

relátkami, riadené arduinom, komunikácia prebiehala cez
Bluetooth 2.1, podvozok bol drevený a zmontovaný niekoľkými skrutkami. Bohužiaľ akékoľvek fotografie sa mi nepodarilo uchovať, takže nechávam priestor vašej predstavivosti :).
Kľúčovým bodom vývoja bola komunikácia. Bluetooth je vhodné len na komunikáciu do vzdialenosti približne 30 metrov, ja som však uvažoval o použití na akúkoľvek vzdialenosť. Ako jediné vhodné riešenie pripadala do úvahy 3G sieť. Z tohto bodu vychádzali všetky ostatné potreby robota:
- Bude potrebný smartfón, ktorý dokáže komunikovať pomocou 3G siete
- Bluetooth modul pre komunikáciu medzi smartfónom a arduinom
- Bude nutné vytvoriť server pre komunikáciu medzi robotom a používateľom pre dosiahnutie [topológie Klient - Server](sk.wikipedia.org/wiki/Klient-server
Tieto 3 body nebudem bližšie v tomto článku rozoberať kvôli ich pomernej zložitosti. Zamerám sa skôr na samotného robota a jeho konštrukciu.
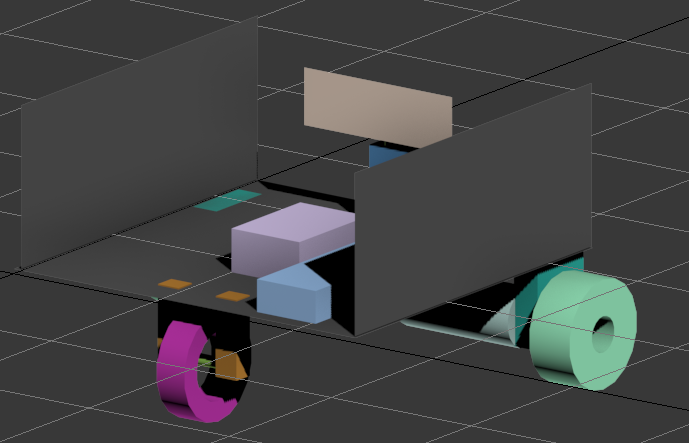
Popri inom som premýšľal hlavne o konštrukcii, keďže v nástrojoch CAD viem ako amatér pracovať. Za pár minút som namodeloval najdôležitejšie komponenty a poukladal ich vedľa seba. Primárne to boli:
- ružové - oporné koliesko
- svetlo-modré - arduino pre ovládanie motorov
- svetlo-ružové - batérie
- hnedý - držiak smartfónu
- tmavšie modré (lepšie viditeľné na ďalšom obrázku) - modelárske servo otáčajúce smartfón pre 180 stupňový rozhľad
- zelené - pohonné sprevodované motory s príslušnými kolesami
Prvý CAD návrh uvažujúci s držiakom pre smartfón
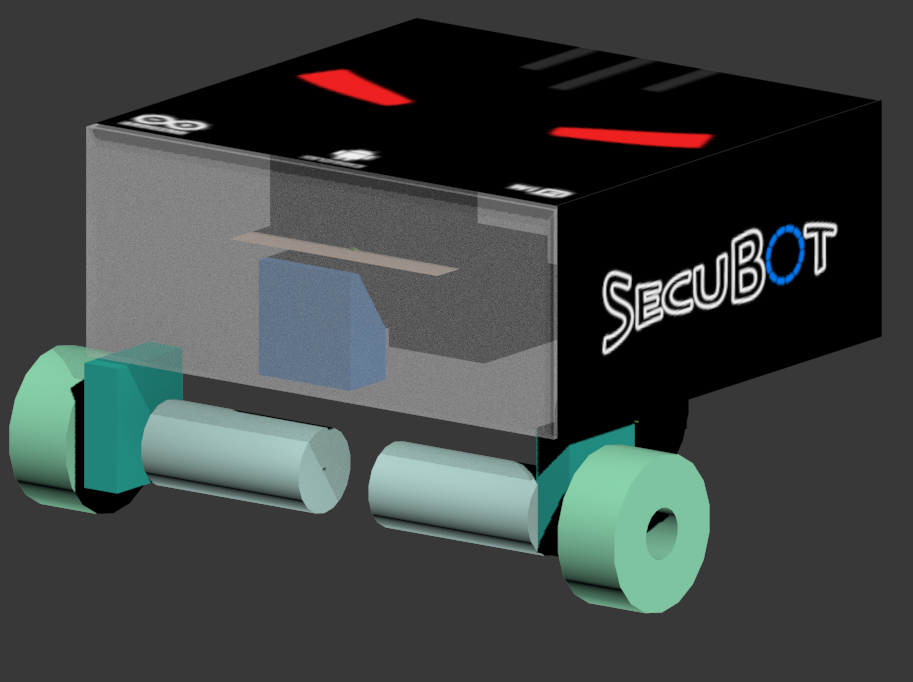
Po niekoľkých dňoch premýšľania a konštruovania som si uvedomil, že kryt je veľmi podstatnou súčasťou robota. U niečoho, čo má odolávať potencionálnym prekážkam a nebezpečnému prostrediu, je to priam nevyhnutnosť. A už keď kryt, tak aj s nejakou peknou grafikou :D
Neskorší render s grafikou - po bokoch názov robota, hore logá technológii, ktoré boli použité, cele odeté v čiernej matnej farbe a vpredu plexisklo, ktoré uzatváralo celého robota do akejsi vzduchotesnej krabici.
Nakoniec tejto fázy vývoja som sa dostal prakticky za niekoľko dní. Výsledkom bol reálny robot s týmito vlastnosťami:
- ovládanie cez 3G sieť pomocou iného smartfónu alebo počítača
- video s frekvenciou cca 4 snímkov za sekundu s oneskorením asi 2 sekundy
- možnosť rozhliadnutia sa vďaka rotácii smartfónu modelárskym servom
- vďaka dostatočne výkonným motorom schopnosť pohybovať sa aj po náročnejšom teréne
Fáza 2 - smartfón preč, nasadenie vlastnej elektroniky
Táto fáza sa odohrávala o niekoľko mesiacov neskôr, kedy som nabral nové vedomosti z iných malých projektov. Fázu 2 sa mi v skutočnosti nikdy nepodarilo dokončiť, hlavne kvôli nedostatku času. Návrh bol ale dostatočne prepracovaný a ten v skratke popíšem v nasledujúcich riadkoch.
Pohon 4x4, hliníkový rám
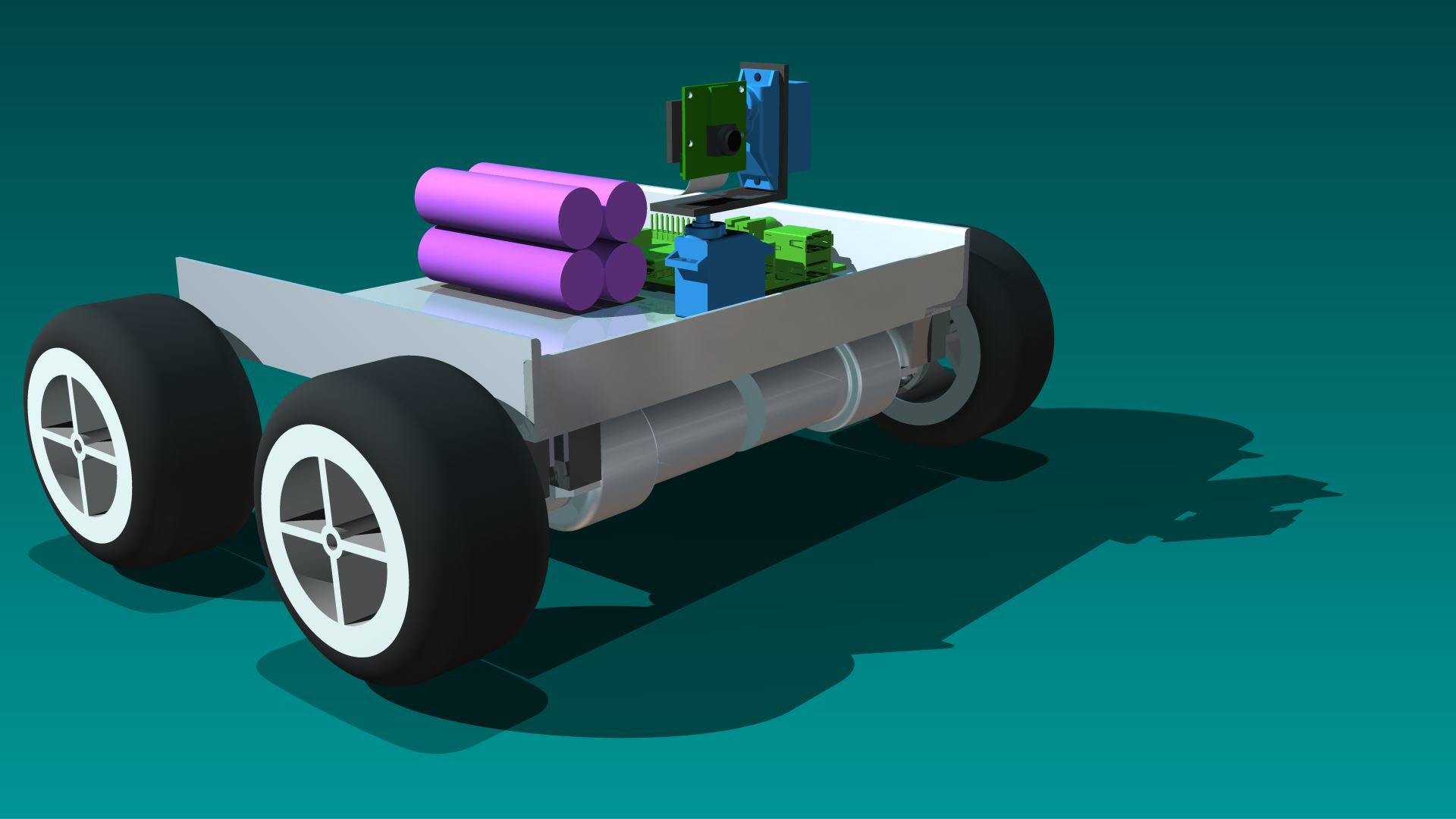
Na obrázku vyššie je ďalší návrh, ktorý počíta s odlišnou elektronikou, pomocou ktorej je možné pohybovať s kamerou v dvoch osiach. Celú výpočtovú silu poskytuje Raspberry PI B a nakoniec všetko je poháňané 4x batériou 3,7V lion typ 18650. Pohon v tomto prípade bol zamenený za omnoho výkonnejší - 4x 3V motory s planetárovou prevodovkou. Tieto motory je možné zohnať v lacných AKU skrutkovačoch, cena jedného je cca 15€. A aby som nezabudol - na komunikáciu je možné pripojiť takmer akýkoľvek 3G USB modem, napríklad Huawei E3531.
Použité plexisklo ako kryt, kupola vytvorená z atrapy kamery
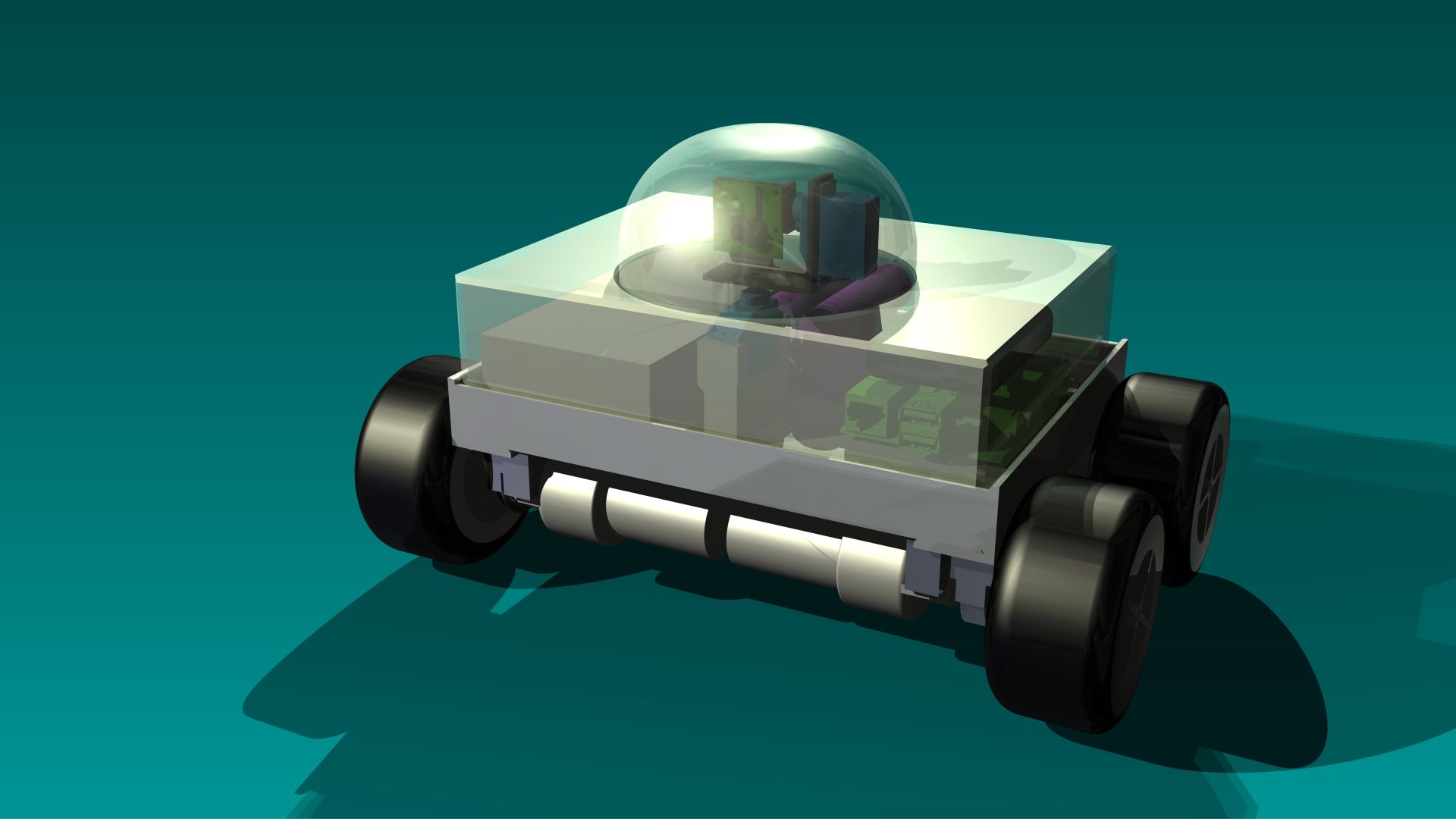

Ako som už spomínal, druhá fáza nebola dokončená. Väčšinu hardvéru som zakúpil, materiál na stavbu podvozku tiež, bohužiaľ voľného času bolo málo. Toľko k histórii tohto môjho prvého robotického projektu, ktorý som čiastočne pretavil do reálneho prototypu, aj napriek drobným pochybnostiam na začiatku vývoja.
Čo ďalej?
Tento článok mal stručne zhrnúť moju ideu robota "ochrankára" a postup vo vývoji reálneho prototypu. A prečo píšem o niečom spred niekoľkých rokov? Nuž preto, lebo v súčasnosti som si našiel kúsok voľného času pokračovať v tomto nápade a v ďalšom článku popíšem už aktuálny vývoj a napredovanie tohto projektu. Nebudú chýbať aj reálne fotografie a krátke videá :)






